Arbeitsprinzip eines bürstenbehafteten Gleichstrommotors
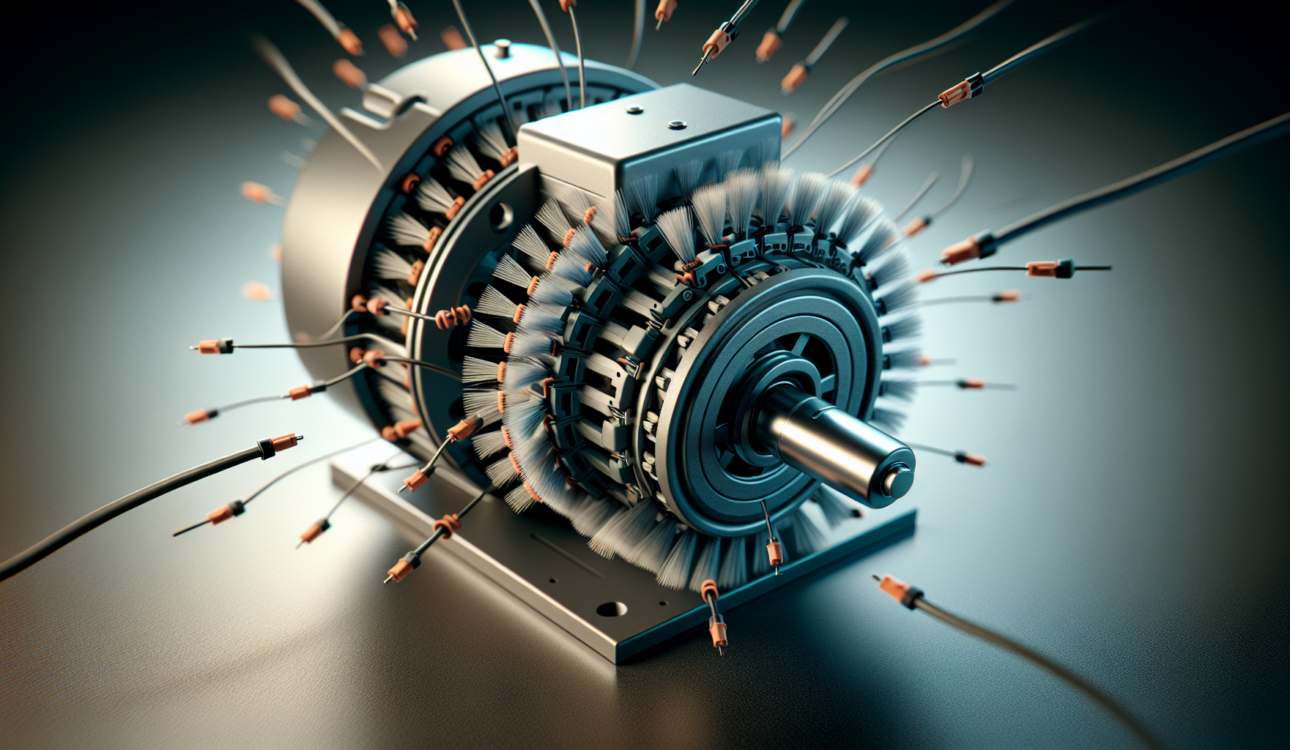
Die Hauptstruktur eines bürstenbehafteten Gleichstrommotors besteht aus Stator + Rotor + Bürste, die durch ein rotierendes Magnetfeld ein Drehmoment erzeugen und kinetische Energie abgeben. Die Bürste steht in ständigem Kontakt und Reibung mit dem Kommutator, der für die Stromleitung und die Umschaltung der Phasen während der Drehung verantwortlich ist.
Bürstenbehaftete Gleichstrommotoren arbeiten mit mechanischer Kommutierung, die Magnetpole bewegen sich nicht, und die Spulen drehen sich. Wenn der Motor in Betrieb ist, drehen sich die Spulen und der Kommutator, die Magnete und Kohlebürsten drehen sich nicht, und der Wechsel der Stromrichtung der Spule wird durch den Kommutator und die Bürsten vollzogen, die sich mit dem Motor drehen.
Bei einem bürstenbehafteten Gleichstrommotor werden die beiden Stromeingangsanschlüsse jeder Spulengruppe ringförmig hintereinander angeordnet und durch Isoliermaterial getrennt, so dass ein zylinderförmiges Gebilde entsteht, das mit der Motorwelle als Ganzes verbunden ist. Der Strom wird durch zwei kleine Säulen aus Kohleelementen (Kohlebürsten) geleitet. Unter der Wirkung von Federdruck drückt sie von zwei bestimmten festen Positionen aus auf zwei Punkte des oberen Spulenstromeingangsringzylinders, um eine Gruppe von Spulen zu erregen.
Wenn sich der Motor dreht, werden verschiedene Spulen oder verschiedene Pole derselben Spule zu unterschiedlichen Zeiten erregt, so dass der NS-Pol der Spule, die das Magnetfeld erzeugt, einen geeigneten Winkelunterschied zu dem NS-Pol des Permanentmagnet-Stators aufweist, der ihm am nächsten ist. Gegensätzliche Pole des Magnetfelds ziehen sich gegenseitig an und gleichartige Pole stoßen sich ab, wodurch eine Kraft erzeugt wird, die den Motor in Drehung versetzt. Die Kohleelektrode gleitet auf dem Spulenanschluss, wie eine Bürste, die über die Oberfläche eines Objekts streicht, weshalb sie auch als "Kohlebürste" bezeichnet wird.
Wenn die Kohlebürsten gegeneinander gleiten, reiben sie aneinander und verursachen Verschleiß, so dass die Kohlebürsten regelmäßig ausgetauscht werden müssen. Wenn die Kohlebürsten und die Spulenanschlüsse abwechselnd ein- und ausgeschaltet werden, entstehen elektrische Funken, die elektromagnetische Schäden verursachen und elektronische Geräte stören können.
Arbeitsprinzip des bürstenlosen DC-Motors
Bei einem bürstenlosen Gleichstrommotor wird die Kommutierungsarbeit von der Steuerschaltung im Regler übernommen (normalerweise ein Hallsensor + Regler, eine fortschrittlichere Technologie ist ein magnetischer Encoder).
Bürstenlose DC-Motoren verwenden eine elektronische Kommutierung, die Spule bewegt sich nicht, und die Magnetpole drehen sich. Bürstenlose Gleichstrommotoren verwenden eine Reihe elektronischer Geräte, um die Position der Permanentmagnetpole über den Hall-Schalter SS2712 zu erfassen. Basierend auf dieser Wahrnehmung werden elektronische Schaltkreise verwendet, um die Stromrichtung in der Spule rechtzeitig umzuschalten, um sicherzustellen, dass die Magnetkraft in der richtigen Richtung erzeugt wird, um den Motor anzutreiben. Die Unzulänglichkeiten von Gleichstrommotoren mit Bürsten werden dadurch beseitigt.
Diese Schaltungen sind Motorsteuerungen. Der Controller des bürstenlosen Gleichstrommotors kann auch einige Funktionen realisieren, die der bürstenbehaftete Gleichstrommotor nicht realisieren kann, wie z. B. die Einstellung des Leistungsschaltwinkels, das Abbremsen des Motors, das Reversieren des Motors, das Verriegeln des Motors und die Verwendung des Bremssignals zum Stoppen der Stromversorgung des Motors. Das elektronische Alarmschloss des aktuellen Batterieautos macht sich diese Funktionen zunutze.
Der bürstenlose Gleichstrommotor besteht aus einem Motorkörper und einem Treiber und ist ein typisches Produkt der Mechatronik. Da der bürstenlose Gleichstrommotor automatisch betrieben wird, benötigt er weder eine zusätzliche Startwicklung auf dem Rotor wie ein Synchronmotor, der unter hoher Last mit variabler Frequenz anläuft, noch erzeugt er Schwingungen und Schrittverluste, wenn sich die Last plötzlich ändert.
Der Unterschied zwischen bürstenbehafteten und bürstenlosen DC-Motoren bei der Drehzahlregelung
Da der bürstenlose Gleichstrommotor jedoch eine elektronische Kommutierung verwendet, ist eine digitale Steuerung erforderlich, während der bürstenbehaftete Gleichstrommotor durch Kohlebürsten kommutiert wird und mit traditionellen analogen Schaltungen wie Thyristoren gesteuert werden kann, was relativ einfach ist.
1. Die Drehzahlregelung eines Bürstenmotors besteht darin, die Spannung der Motorstromversorgung anzupassen. Die eingestellte Spannung und der Strom werden durch den Kommutator und die Bürsten umgewandelt, um die Stärke des von der Elektrode erzeugten Magnetfelds zu ändern und so die Drehzahl zu verändern. Dieser Vorgang wird als variable Spannungsdrehzahlregelung bezeichnet.
2. Der Prozess der Drehzahlregelung eines bürstenlosen Motors besteht darin, die Drehzahl durch Änderung des Steuersignals des elektrischen Reglers zu ändern, während die Spannung der Motorstromversorgung unverändert bleibt, und dann die Schaltfrequenz der Hochleistungs-MOS-Röhre durch den Mikroprozessor zu ändern. Dieser Vorgang wird als variable Frequenzregelung bezeichnet.
Leistungsunterschiede
1. Bürstenmotoren haben eine einfache Struktur, eine lange Entwicklungszeit und eine ausgereifte Technologie.
Bereits im 19. Jahrhundert, als der Motor geboren wurde, war der praktische Motor ein bürstenloser Motor, d. h. der Wechselstrom-Asynchronmotor mit Käfigläufer, der nach der Entwicklung des Wechselstroms weit verbreitet war.
Allerdings weisen Asynchronmotoren viele unüberwindbare Mängel auf, was in der Vergangenheit zu einer langsamen Entwicklung der Motorentechnik geführt hat. Insbesondere bürstenlose Gleichstrommotoren wurden erst in den letzten Jahren kommerziell eingesetzt, da sich die elektronische Technologie von Tag zu Tag weiterentwickelt hat. Im Wesentlichen gehören sie immer noch zur Kategorie der Wechselstrommotoren.
Kurz nach der Erfindung des bürstenlosen Motors wurde der bürstenbehaftete Gleichstrommotor erfunden. Da der DC-Bürstenmotor eine einfache Struktur hat, einfach zu produzieren und zu verarbeiten ist, einfach zu warten und einfach zu steuern ist; der DC-Motor hat auch die Eigenschaften der schnellen Reaktion, großes Startdrehmoment, und die Fähigkeit, Nenndrehmoment von Null-Drehzahl zu Nenndrehzahl zu liefern, hat es weit verbreitet seit seiner Einführung verwendet.
2. Der bürstenbehaftete DC-Motor hat eine schnelle Reaktionsgeschwindigkeit und ein großes Startdrehmoment
Der bürstenbehaftete Gleichstrommotor hat eine schnelle Anlaufgeschwindigkeit, ein großes Anlaufdrehmoment, einen sanften Drehzahlwechsel und fast keine Vibrationen zwischen Null und Höchstdrehzahl. Er kann beim Start eine größere Last antreiben. Der bürstenlose Motor hat einen großen Startwiderstand (induktiver Blindwiderstand), so dass der Leistungsfaktor klein ist, das Startdrehmoment ist relativ klein, es gibt ein brummendes Geräusch beim Start, begleitet von starken Vibrationen, und die beim Start angetriebene Last ist klein.
3. Der DC-Bürstenmotor läuft reibungslos und hat gute Start- und Bremseffekte
Bürstenmotoren regeln die Drehzahl durch Spannungsregelung, so dass sie sanft anlaufen und bremsen und auch bei konstanter Drehzahl sanft laufen. Bürstenlose Motoren sind in der Regel durch digitale Frequenzumwandlung gesteuert, die zunächst Wechselstrom in Gleichstrom und dann Gleichstrom in Wechselstrom umwandelt und die Geschwindigkeit durch Änderung der Frequenz steuert. Daher laufen bürstenlose Gleichstrommotoren beim Anfahren und Abbremsen nicht gleichmäßig und haben starke Vibrationen. Sie sind nur stabil, wenn die Drehzahl konstant ist.
4. Hohe Regelgenauigkeit des bürstenbehafteten DC-Motors
Bürstenbehaftete Gleichstrommotoren werden in der Regel mit Untersetzungsgetrieben und Encodern eingesetzt, um die Ausgangsleistung des Motors und die Regelgenauigkeit zu erhöhen. Die Regelgenauigkeit kann bis zu 0,01 mm betragen, wodurch die beweglichen Teile fast überall angehalten werden können, wo Sie es wünschen. Alle Präzisionswerkzeugmaschinen verwenden Gleichstrommotoren mit hoher Regelgenauigkeit. Bürstenlose Gleichstrommotoren sind beim Anfahren und Abbremsen nicht stabil, so dass die beweglichen Teile jedes Mal an einer anderen Position anhalten und mit Hilfe von Positionierstiften oder Begrenzern an der gewünschten Position angehalten werden müssen.
5. DC-Bürstenmotor hat niedrige Kosten und einfache Wartung
Da bürstenbehaftete Gleichstrommotoren eine einfache Struktur, niedrige Produktionskosten, viele Hersteller und eine relativ ausgereifte Technologie haben, sind sie weit verbreitet, z. B. in Fabriken, verarbeitenden Werkzeugmaschinen, Präzisionsinstrumenten usw. Wenn der Motor ausfällt, muss nur die Kohlebürste ersetzt werden, und jede Kohlebürste kostet nur ein paar Yuan, was sehr günstig ist. Die Technologie des bürstenlosen Gleichstrommotors ist unausgereift, der Preis ist hoch und der Anwendungsbereich ist begrenzt. Er sollte hauptsächlich in Geräten mit konstanter Drehzahl eingesetzt werden, wie z. B. in Klimaanlagen mit variabler Frequenz, Kühlschränken usw. Bürstenlose Gleichstrommotoren können nur ersetzt werden, wenn sie beschädigt sind.
6. Keine Bürste, geringe Interferenz
Der bürstenlose Gleichstrommotor hat die Bürsten überflüssig gemacht. Die direkteste Änderung ist, dass keine Funken erzeugt werden, wenn der bürstenbehaftete Motor läuft, was die Störung von Funken auf Fernsteuerungsfunkgeräten stark reduziert.
7. Geräuscharmer und reibungsloser Betrieb
Der bürstenlose Gleichstrommotor hat keine Bürsten, so dass die Reibung während des Betriebs stark reduziert ist und der Motor gleichmäßig und mit viel weniger Lärm läuft. Dieser Vorteil ist eine große Unterstützung für die Stabilität des Modellbetriebs.
8. Lange Lebensdauer und niedrige Wartungskosten
Da der bürstenlose Gleichstrommotor keine Bürsten hat, tritt der Verschleiß hauptsächlich an den Lagern auf. Aus mechanischer Sicht ist der bürstenlose Gleichstrommotor nahezu wartungsfrei. Bei Bedarf ist lediglich eine gewisse Wartung zur Staubentfernung erforderlich.
Prinzip der Steuerung bürstenloser DC-Motoren
Die Motorantriebssteuerung steuert die Drehung oder das Anhalten des Motors sowie die Drehgeschwindigkeit. Der Teil der Motorantriebssteuerung wird auch als elektronischer Drehzahlregler oder kurz ESC bezeichnet. ESCs werden je nach den verwendeten Motoren in bürstenlose ESCs und bürstenlose ESCs unterteilt.
Der Permanentmagnet eines bürstenbehafteten Gleichstrommotors ist feststehend, und die Spule ist um den Rotor gewickelt. Eine Bürste steht intermittierend in Kontakt mit dem Kommutator, um die Richtung des Magnetfelds zu ändern und den Rotor kontinuierlich drehen zu lassen. Wie der Name schon sagt, hat ein bürstenloser Gleichstrommotor keine so genannten Bürsten und Kommutatoren. Sein Rotor ist ein Permanentmagnet, und die Spule ist fest und direkt an eine externe Stromversorgung angeschlossen. Die Frage ist, wie man die Richtung des Magnetfelds der Spule ändern kann. Ein bürstenloser Gleichstrommotor benötigt nämlich auch einen elektronischen Drehzahlregler im Außenbereich. Dieser Drehzahlregler ist, einfach ausgedrückt, ein Motorantrieb. Er ändert jederzeit die Richtung des Stroms in der feststehenden Spule, um sicherzustellen, dass die Kraft zwischen ihr und dem Permanentmagneten sich gegenseitig abstößt, so dass eine kontinuierliche Drehung möglich ist.
Bürstenmotoren können ohne Regler arbeiten, indem sie den Motor direkt mit Strom versorgen, aber die Motordrehzahl kann auf diese Weise nicht gesteuert werden. Bürstenlose DC-Motoren müssen mit ESCs ausgestattet sein, sonst können sie sich nicht drehen. Der Gleichstrom muss vom bürstenlosen Regler in dreiphasigen Wechselstrom umgewandelt und dann zur Drehung an den bürstenlosen Gleichstrommotor übertragen werden.
Die frühesten ESCs waren nicht wie die heutigen ESCs. Sie waren alle gebürstet ESCs. Sie fragen sich vielleicht, was ein gebürsteter Regler ist und was der Unterschied zwischen ihm und den aktuellen bürstenlosen Reglern ist. In der Tat ist der Unterschied gewaltig. Sowohl bürstenbehaftete als auch bürstenlose ESCs basieren auf Motoren. Der Rotor des aktuellen Motors, also der rotierende Teil, besteht nur aus Magneten, und die Spule ist der Stator, der sich nicht dreht, weil keine Kohlebürste dazwischen ist. Dies ist ein bürstenloser Gleichstrommotor.
Bürstenmotoren haben, wie der Name schon sagt, Kohlebürsten, sind also gebürstete Gleichstrommotoren. Die Motoren, die zum Beispiel in den ferngesteuerten Autos verwendet werden, mit denen Kinder normalerweise für 10 bis 20 Yuan spielen, sind bürstenbehaftete Gleichstrommotoren. Die Regler sind nach diesen beiden Motortypen benannt, nämlich bürstenbehaftete Regler und bürstenlose Regler. Aus professioneller Sicht geben bürstenbehaftete Regler Gleichstrom aus, während bürstenlose Regler Dreiphasen-Wechselstrom ausgeben. Gleichstrom ist die in unseren Batterien gespeicherte Elektrizität, die positive und negative Pole hat. Unsere 220-Volt-Haushaltsstromversorgung und die Stromversorgung für Handy-Ladegeräte oder Computer sind alle Wechselstrom.
Wechselstrom hat eine bestimmte Frequenz. Laienhaft ausgedrückt, handelt es sich um eine Leitung, die Positiv und Negativ, Positiv und Negativ hin und her tauscht; Gleichstrom ist eine Leitung mit positiven und negativen Polen. Nachdem wir nun herausgefunden haben, was Wechselstrom und Gleichstrom sind, was ist "Dreiphasenstrom"? Theoretisch ist Dreiphasen-Wechselstrom eine Form der Stromübertragung, die als Dreiphasenstrom bezeichnet wird. Es handelt sich um eine Stromquelle, die aus drei Wechselspannungen mit gleicher Frequenz, gleicher Amplitude und einem Phasenunterschied von 120 Grad besteht. Laienhaft ausgedrückt, handelt es sich um den Dreiphasenwechselstrom, den wir zu Hause verwenden. Abgesehen von der Spannung, der Frequenz und dem Ansteuerungswinkel ist alles andere identisch. Jetzt wissen Sie Bescheid über Dreiphasenstrom und Gleichstrom.
Der bürstenlose Regler nimmt Gleichstrom auf, der durch einen Filterkondensator stabilisiert wird. Dann wird er in zwei Pfade aufgeteilt. Ein Pfad wird vom BEC des Reglers genutzt. Das BEC wird für die Stromversorgung des Empfängers und des ESC-eigenen Mikrocontrollers verwendet. Die Stromleitung, die zum Empfänger führt, ist die rote und schwarze Linie auf der Signalleitung. Der andere Pfad wird von der MOS-Röhre genutzt. Wenn der Regler eingeschaltet wird, beginnt der Mikrocontroller zu arbeiten und versetzt die MOS-Röhre in Schwingung, wodurch der Motor ein tropfenförmiges Geräusch abgibt.
Nach dem Start ist er betriebsbereit. Einige ESCs verfügen über eine Drosselklappen-Kalibrierungsfunktion. Bevor er in den Standby-Modus wechselt, überwacht er, ob die Drosselklappenposition hoch, niedrig oder in der Mitte ist. Wenn sie hoch ist, wird die Kalibrierung des Reglerhubs eingeleitet. Liegt sie in der Mitte, gibt er ein Alarmsignal aus und der Motor piept. Wenn er niedrig ist, geht er in den normalen Betriebszustand über. Nachdem alles bereit ist, bestimmt die MCU im Regler die Ausgangsspannung und -frequenz entsprechend dem Signal auf der PWM-Signalleitung sowie die Fahrtrichtung und den Zeitwinkel, um die Motorgeschwindigkeit und -richtung zu steuern. Dies ist das Prinzip des bürstenlosen ESC. Wenn der Motor angetrieben wird, arbeiten im Regler 3 Gruppen von MOS-Röhren mit jeweils 2 Polen, von denen eine den positiven Ausgang und die andere den negativen Ausgang steuert. Wenn der positive Ausgang arbeitet, arbeitet der negative Ausgang nicht, und wenn der negative Ausgang arbeitet, arbeitet der positive Ausgang nicht, so dass ein Wechselstrom entsteht. In ähnlicher Weise arbeiten alle drei Gruppen auf diese Weise, und ihre Frequenz ist 8000HZ . Der bürstenlose Regler entspricht also einem Frequenzumrichter oder Drehzahlregler, der bei Motoren in einer Fabrik verwendet wird.
Der Eingang des ESC ist ein Gleichstrom, der normalerweise von einer Lithium-Batterie gespeist wird. Der Ausgang ist dreiphasiger Wechselstrom, der den Motor direkt antreiben kann. Darüber hinaus hat der bürstenlose elektronische Drehzahlregler für Modellflugzeuge drei Signaleingangsleitungen, über die PWM-Signale zur Steuerung der Motordrehzahl eingegeben werden. Für Modellflugzeuge, insbesondere Quadcopter, sind aufgrund ihrer Besonderheit spezielle Modellflugregler erforderlich.
Warum brauchen Quadcopter also spezielle ESCs? Was ist so besonders an ihnen? Ein Quadcopter hat vier Propeller, die in einer Kreuzstruktur angeordnet sind. Die Propeller können in Vorwärts- und Rückwärtsrichtung gedreht werden, wodurch das Problem des Trudelns, das durch die Drehung eines einzelnen Propellers entsteht, ausgeglichen werden kann. Der Durchmesser der einzelnen Propeller ist sehr klein, und die Zentrifugalkraft der vier Propeller verteilt sich, wenn sie sich drehen. Im Gegensatz zu den Propellern eines Hubschraubers kann nur ein einziger Propeller eine konzentrierte Zentrifugalkraft erzeugen, die eine gyroskopische Trägheitsfliehkraft erzeugt, die ein schnelles Umkippen des Rumpfes verhindert. Daher ist die Aktualisierungsfrequenz des üblicherweise verwendeten Servosteuersignals sehr niedrig.
Damit der Quadcopter schnell reagieren kann, um die durch Lageänderungen verursachte Drift zu bewältigen, ist ein Regler mit hoher Reaktionsgeschwindigkeit erforderlich. Die Aktualisierungsgeschwindigkeit herkömmlicher PPM ESC beträgt nur etwa 50 Hz, was die für diese Steuerung erforderliche Geschwindigkeit nicht erreicht. Darüber hinaus verfügt die PPM ESC MCU über eine integrierte PID-Drehzahlregelung, die für herkömmliche Flugzeugmodelle sanfte Geschwindigkeitsänderungen ermöglicht, aber nicht für Quadcopter geeignet ist, die schnell reagierende Motordrehzahländerungen benötigen. Mit einem speziellen Hochgeschwindigkeitsregler und der IIC-Bus-Schnittstelle zur Übertragung von Steuersignalen können Hunderte oder Tausende von Motordrehzahländerungen pro Sekunde erreicht werden, so dass die Fluglage während des Quadcopter-Flugs jederzeit stabil gehalten werden kann. Selbst wenn der Quadcopter plötzlich von äußeren Kräften getroffen wird, ist er immer noch sicher und stabil.